

Signal Detection Theory with an Arduino.
An Arduino is an open source micro computer that allows users to create easily-programmable hardware and software projects.
I used my Arduino to conduct a small study involving signal detection theory.
Roles: Researcher (Solo project)
Timeline: 1 week
Context: Coursework
The goal of this project was to create an Arduino system to conduct an experiment on signal detection theory to understand how it works in a hands-on way as well as to think of further applications of this process for the human factors world.
I set up an Arduino system to run the experiment. I ran the code and told the participants to click the button whenever the light and the sound occur at the same time. Then I compiled and analyzed the data.
Tools: Arduino, Excel
Participants
The participants for this study were college and masters students aged 21-22 with no auditory or visual abnormalities. Due to COVID-19, the number of available participants was limited to only a handful of participants. To conduct proper data analysis, the experiment would need to be repeated with more participants in the future.
Steps of the Study
Create the volume control for each participant.
For this step I calibrated the Arduino to produce a buzzer noise at the proper level for each participant’s hearing.
Create system to collect data.
I used some starter code for the buzzer and the lights and adapted it to fit my needs.
Run participants and collect data.
I instructed participants to click the button when they hear a noise and see the light turn on.
Analyze and apply the data to the HF world.
I recorded the data in an Excel document and analyzed its significance.

“Anytime the light turns on, press the button if there is also a sound.”
— Researcher instructions
Classifications

Hit.
User detects a signal.
There is a signal.

False Alarm.
User detects a signal.
There is no signal.

Miss.
User does not detect a signal.
There is a signal.
Correct Rejection.
User does not detect a signal.
There is no signal.
Results
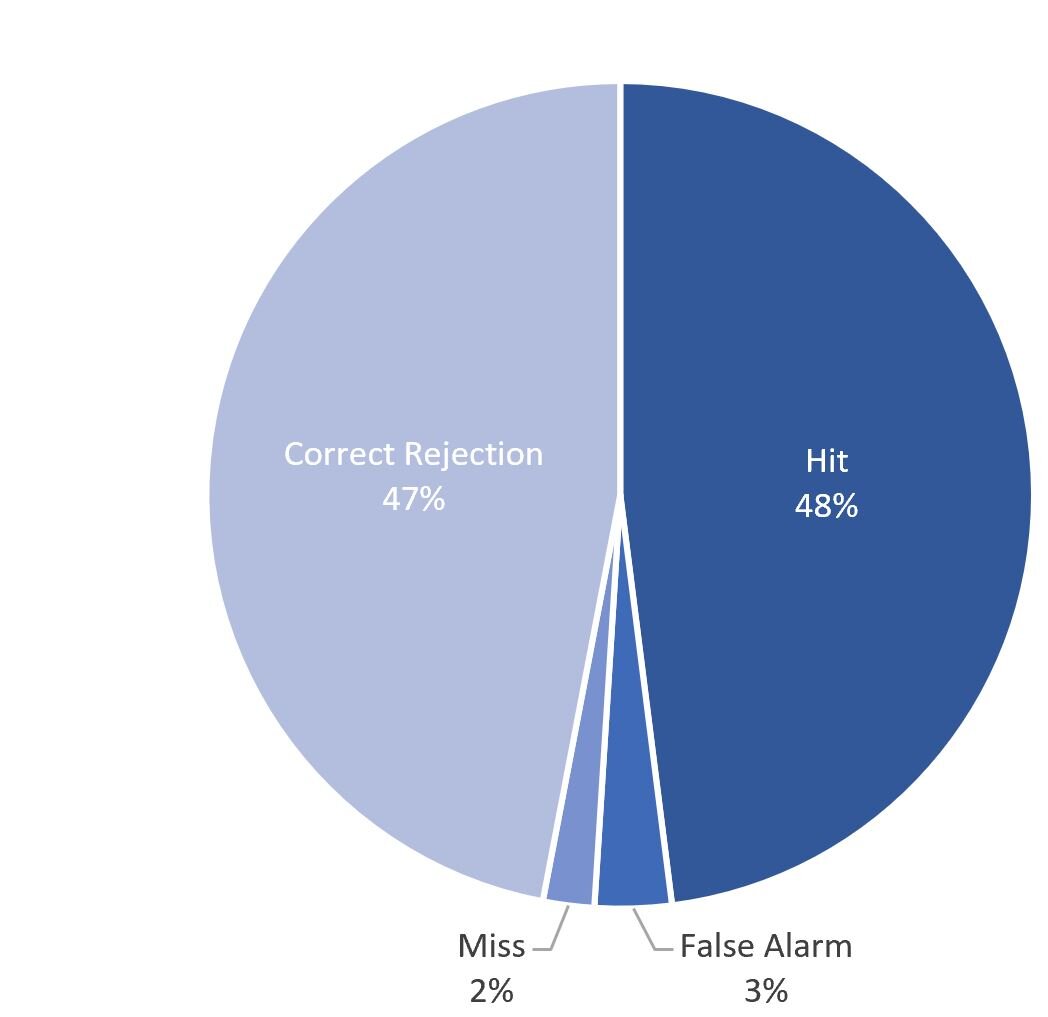
In this chart it is clear that the participants were fairly accurate at identifying and hearing the light and sound. The rate of misses and false alarms was relatively low compared with the accuracy of the correct rejections and hits.

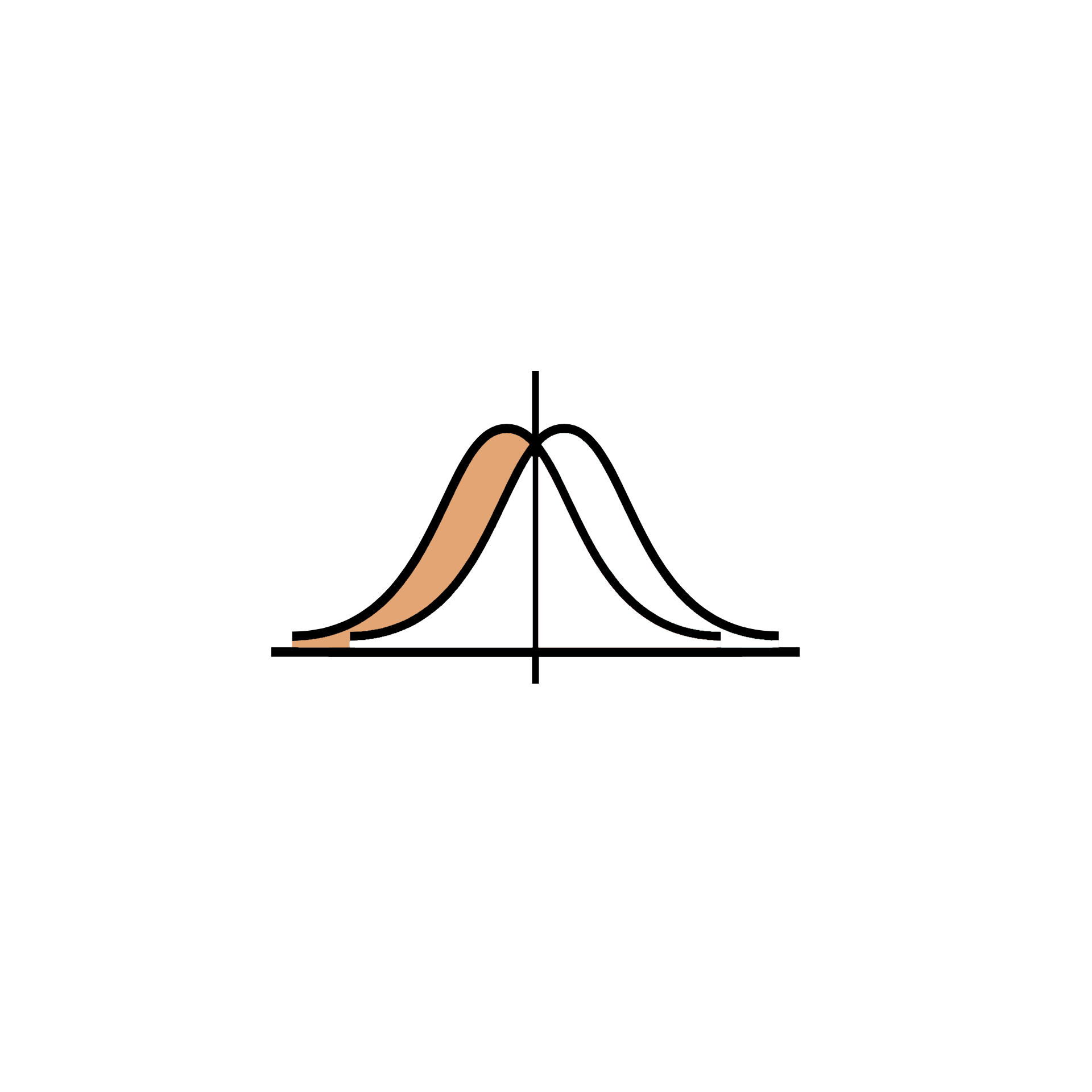
This chart shows the difference for one participant in two different environments. In a loud, traffic-filled environment, the participant was 100% accurate (experienced zero false alarms and zero misses). In the quiet environment, the user experienced more false alarms and misses.

This chart shows the difference for one participant in two different environments. In a loud, traffic-filled environment, the participant was 100% accurate (experienced zero false alarms and zero misses). In the quiet environment, the user experienced more false alarms and misses. There is also a representation of the signal detection curves and ROC (Receiver Operating Characteristic) curves.
Discussion of data
The data suggest that environment in which the user tries to detect a signal in is a key indication of the success that the user will experience. When attempting to pick the signal out of the noise, the more noise there is, the more crowded out the signal will become. Although this experiment was run on only a handful of participants due to COVID-19, it is clear that when there are distractions in the environment, the difficulty of picking out the signal increases. There are many applications of this rule for design.
Applications
Understanding signal detection theory is very applicable for the design of safety critical alarms. One prominent example is the use of alarms in self driving vehicles. In the intermediary levels of automation (level 2 - level 4), there is a combination of driving that the user and the vehicle do in unison. If the computer is unable to drive for some reason, then the human must take over. There are many ways to signify to the human driver that he or she needs to steer the vehicle. However, if the alarms have not been properly tested for detectability in the environment due to road noise, honking, radio, talking, etc., then the user may not know that they need to resume control which could lead to a hazardous situation.